工業(yè)機器人周邊控制系統(tǒng)—西門子PLC編程軟件博途詳細(xì)入門?
《工業(yè)機器人周邊控制系統(tǒng)—西門子PLC編程軟件博途詳細(xì)入門?》要點:
本文介紹了工業(yè)機器人周邊控制系統(tǒng)—西門子PLC編程軟件博途詳細(xì)入門?,希望對您有用。如果有疑問,可以聯(lián)系我們。
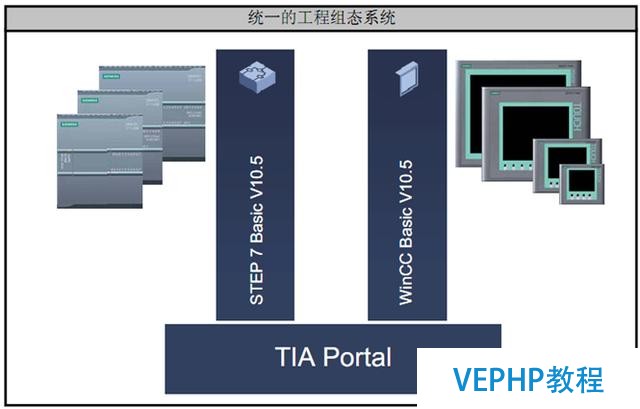
在介紹博途軟件時,不得不講這個兩個軟件:
SIMATIC STEP 7 Basic 是西門子公司開發(fā)的高集成度工程組態(tài)系統(tǒng);
SIMATIC Wincc Basic是向任務(wù)的HMI智能組態(tài)軟件.
為什么要講這兩個軟件,因為博途正是由這兩個軟件組成.
上述兩個軟件集成在一起,也稱為TIA (Totally Integrated Automation,全集成自動化)Portal, 它提供了直觀易用的編輯器,用于對西門子PLC和精簡系列面板進行高效組態(tài).
除了支持編程以外,還為硬件和網(wǎng)絡(luò)組態(tài)、診斷等提供通用的工程組態(tài)框架.
接下來我來講下博途
博途提供了兩種編程語言(LAD 和 FBD) .
有兩種視圖:Portal(門戶)視圖,可以概覽自動化項目的所有任務(wù);項目視圖,將整個項目(包含PLC和HMI)按多層結(jié)構(gòu)顯示在項目樹中.
一、博途功能概述
1、如何使用博途創(chuàng)建自動化系統(tǒng)
a、典型的自動化系統(tǒng)包括以下內(nèi)容:
借助程序來控制過程的PLC;
用來操作和可視化過程的 HMI 設(shè)備.
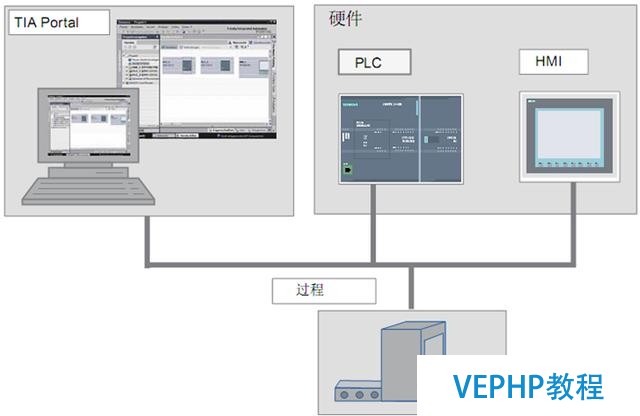
b、TIA Portal 可用來贊助您創(chuàng)建自動化系統(tǒng),關(guān)鍵的組態(tài)步驟為:
創(chuàng)建項目
配置硬件
聯(lián)網(wǎng)設(shè)備
對PLC 編程
組態(tài)可視化
加載組態(tài)數(shù)據(jù)
使用在線和診斷功能
2、博途軟件工程組態(tài)
可以使用 TIA Portal 在同一個工程組態(tài)系統(tǒng)中組態(tài) PLC 和可視化.
所有數(shù)據(jù)均存儲在一個項目中,STEP 7和WinCC不是單獨的程序,而是可以拜訪公共數(shù)據(jù)庫.
所有數(shù)據(jù)均存儲在一個公共的項目文件中.
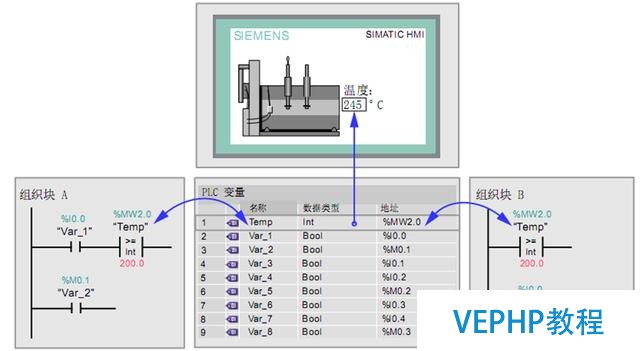
3、博途軟件數(shù)據(jù)管理
在 TIA Portal 中,所有數(shù)據(jù)都存儲在一個項目中.修改后的應(yīng)用程序數(shù)據(jù)(如變量)會在整個項目內(nèi)(甚至跨越多臺設(shè)備)自動更新.
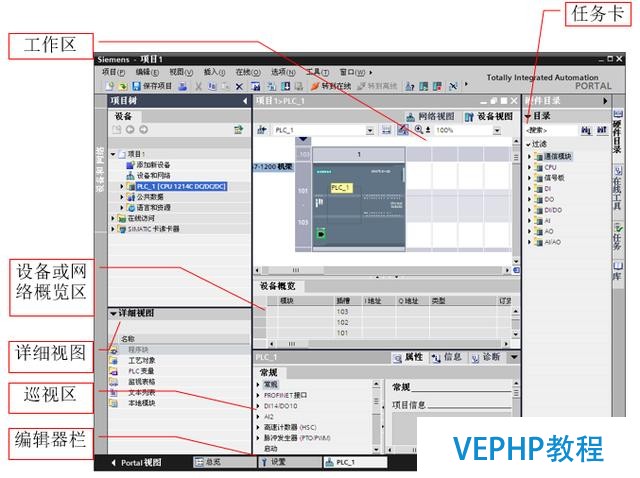
二、博途軟件的基礎(chǔ)操作
1、界面總覽
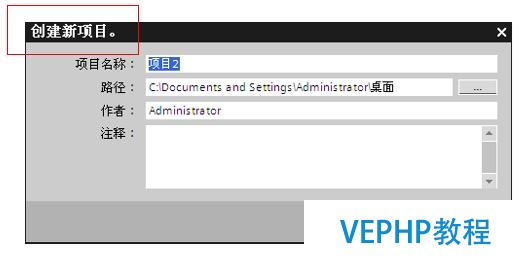
2、創(chuàng)建新項目
點擊“項目”—“新建”,出現(xiàn)“創(chuàng)建新項目”對話框:
3、添加新設(shè)備

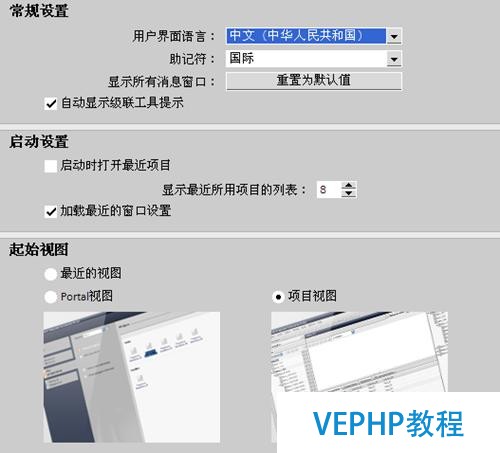
4、參數(shù)設(shè)置
“選項”—“設(shè)置”:
5、組態(tài)的任務(wù)
設(shè)備組態(tài) (configuring)的任務(wù)就是在設(shè)備和網(wǎng)絡(luò)編輯器中生成一個與實際的硬件系統(tǒng)對應(yīng)的模擬系統(tǒng),包含系統(tǒng)中的設(shè)備(PLC和HMI),PLC各模塊的型號、訂貨號和版本.
模塊的安裝位置和設(shè)備之間的通信連接,都應(yīng)與實際的硬件系統(tǒng)完全相同.
此外還應(yīng)設(shè)置模塊的參數(shù),即給參數(shù)賦值,或稱為參數(shù)化.
自動化系統(tǒng)啟動時,CPU比較組態(tài)時生成的虛擬系統(tǒng)和實際的硬件系統(tǒng),如果兩個系統(tǒng)不一致,將采取相應(yīng)的措施.
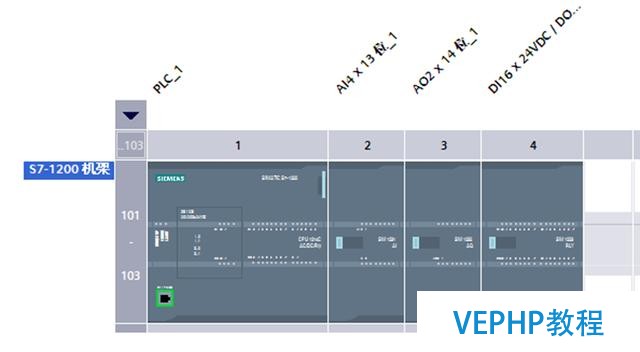
5.1、硬件組態(tài)添加模塊
在硬件組態(tài)時,需要將I/O模塊或通信模塊放置到工作區(qū)的機架的插槽內(nèi):用“拖放”的辦法放置硬件對象;用“雙擊”的辦法放置硬件對象.
5.2、硬件組態(tài)過濾器
如果激活了硬件目錄的過濾器功能,則硬件目錄只顯示與工作區(qū)有關(guān)的硬件.
例如用設(shè)備視圖打開PLC的組態(tài)畫面時,則硬件目錄不顯示HMI,只顯示PLC的模塊.

5.3、硬件組態(tài)刪除硬件組件
可以刪除設(shè)備視圖或網(wǎng)絡(luò)視圖中的硬件組態(tài)組件,被刪除的組件的地址可供其他組件使用.不能單獨刪除CPU和機架,只能在網(wǎng)絡(luò)視圖或項目樹中刪除整個PLC站.
刪除硬件組件后,可以對硬件組態(tài)進行編譯.編譯時進行一致性檢查,如果有錯誤將會顯示錯誤信息,應(yīng)改正錯誤后重新進行編譯.
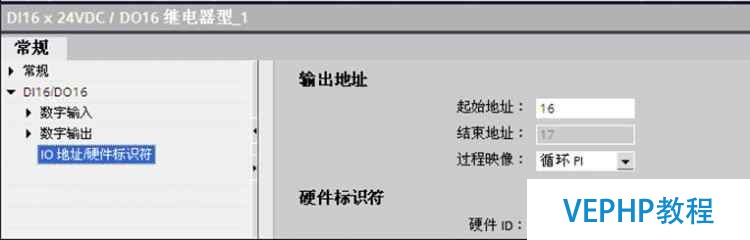
5.4、硬件組態(tài)信號模塊和信號板的地址分配
添加了CPU、信號板或信號模塊后,他們的I/O地址是自動分配的.選中“設(shè)備概覽”,可以看到CPU集成的I/O模板、信號板、信號模塊的地址.


選中模塊,通過巡視窗口的“I/O地址/硬件標(biāo)識符”,可以修改模塊的地址:
也可以直接在設(shè)備概覽中修改:

DI/DO的地址以字節(jié)為單位分配,沒有用完一個字節(jié),剩余的位也不能作它用.
AI/AO的地址以組為單位分配,每一組有兩個輸入/輸出點,每個點(通道)占一個字或兩個字節(jié).
建議不要修改自動分配的地址.
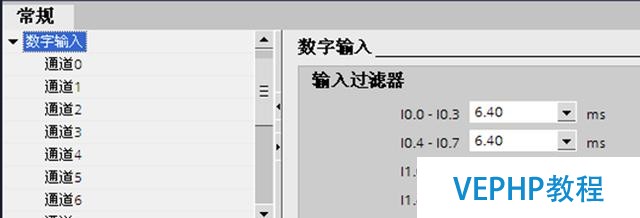
5.5、硬件組態(tài)數(shù)字量輸入點的參數(shù)設(shè)置
選中設(shè)備視圖中的CPU、信號模塊或信號板,然后選中巡視窗口,設(shè)置輸入端的濾波器時間常數(shù):
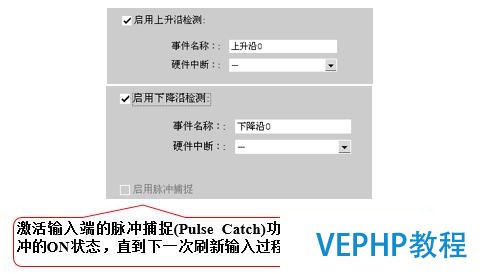
可以激活輸入點的上升沿和下降沿中斷功能,以及設(shè)置產(chǎn)生中斷時調(diào)用的硬件中斷OB:
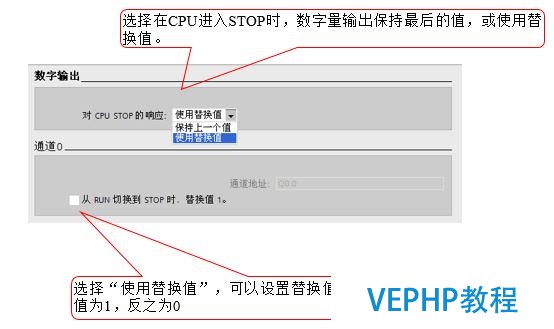
5.6、硬件組態(tài)數(shù)字量輸出點的參數(shù)設(shè)置
5.7、硬件組態(tài)模擬量輸入點的參數(shù)設(shè)置

5.8、硬件組態(tài)模擬量輸出點的參數(shù)設(shè)置
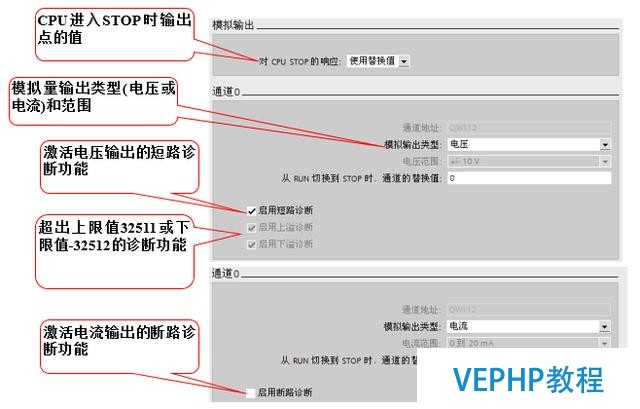
5.9、硬件組態(tài)模擬量如轉(zhuǎn)換后模擬值表示
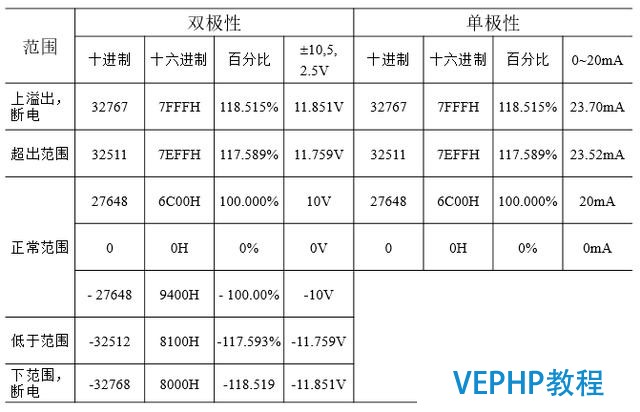
模擬量輸入輸出模塊中模擬量對應(yīng)的數(shù)字稱為模擬值,模擬值用16位二進制補碼(整數(shù))表示.最高位(第16位)為符號位,正數(shù)的符號位為0,負(fù)數(shù)的符號位為1.
模擬量經(jīng)A/D轉(zhuǎn)換后得到的數(shù)值的位數(shù)如果小于16,則自動左移,使其符號位在16位字的最高位,未使用的低位則填入0,稱為“左對齊”.設(shè)模擬量的精度為12位加符號位,左移3位后,相對于實際的模擬值被乘以8.
這種處理辦法的優(yōu)點在于模擬量的量程與移位處理后的數(shù)字的關(guān)系是固定的,與左對齊之前的轉(zhuǎn)換值無關(guān),便于后續(xù)的處理.
5.10、硬件組態(tài)模擬量轉(zhuǎn)換舉例
根據(jù)模擬量輸入模塊的輸出值計算對應(yīng)的物理量時,應(yīng)考慮變送器的輸入/輸出量程和模擬量輸入模塊的量程,找出被測物理量與A/D轉(zhuǎn)換后的數(shù)字之間的比例關(guān)系.
例:壓力變送器的量程為0~10MPa,輸出信號為0~10V,模擬量輸入模塊的量程為0~10V,轉(zhuǎn)換后的數(shù)字量為0~27648.
設(shè)轉(zhuǎn)換后得到的數(shù)字為N,試求以kPa為單位的壓力值.
0~10MPa的模擬量對應(yīng)于數(shù)字量0~27648,轉(zhuǎn)換公式為 :

在運算時一定要先乘后除,否則會損失原始數(shù)據(jù)的精度.
例:某溫度變送器的量程為-100~500°C,輸出信號為4~20mA,某模擬量輸入模塊將0~20mA 的電流信號轉(zhuǎn)換后的數(shù)字0~27648.
設(shè)轉(zhuǎn)換后得到的數(shù)字為N,求以0.1 °C為單位的溫度值.
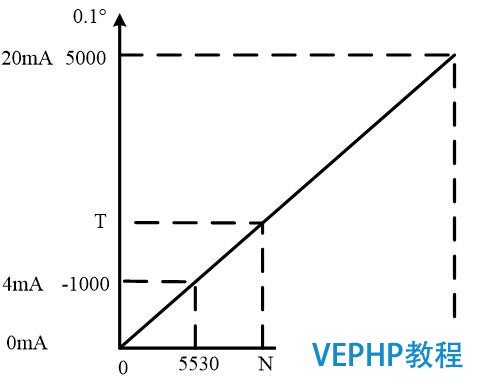
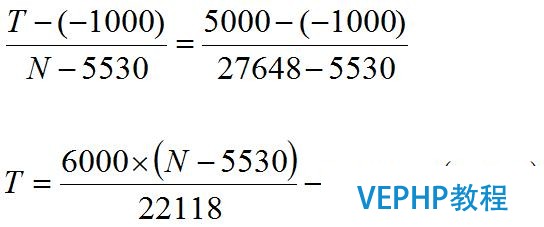
單位為0.1 °C 的溫度值-1000~5000對應(yīng)于數(shù)字量5530~27648,轉(zhuǎn)換公式為 :
5.11、硬件組態(tài)設(shè)置系統(tǒng)存儲器字節(jié)與時鐘存儲器字節(jié)

將MB1設(shè)置為系統(tǒng)存儲器字節(jié)后,該字節(jié)的M1.0~M1.3的含義:
M1.0(首次循環(huán)):僅在進入RUN模式的首次掃描時為1,以后為0;
M1.1(診斷圖形已更改):CPU登錄了診斷事件時,在一個掃描周期內(nèi)為1;
M1.2(始終為1):總是為1狀態(tài),其常開觸點總是閉合;
M1.3(始終為0):總是為0狀態(tài),其常閉觸點總是閉合;
時鐘脈沖是一個周期內(nèi)0和1所占的時間各為50%的方波信號,時鐘存儲器字節(jié)每一位對應(yīng)的時鐘脈沖的周期或頻率如表.CPU在掃描循環(huán)開始時初始化這些位.
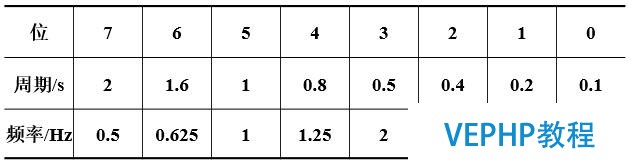
以M0.5為例,其時鐘脈沖的周期為1s,如果用它的觸點來控制某輸出點對應(yīng)的指示燈,指示燈將以1Hz的頻率閃動,亮0.5s,暗0.5s.
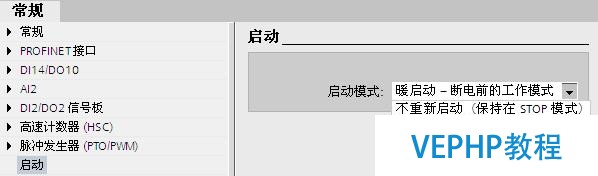
5.12、硬件組態(tài)設(shè)置PLC上電后的啟動方式
組態(tài)上電后CPU的3種啟動方式:
不重新啟動,保持在STOP模式;
暖啟動,進入RUN模式;
暖啟動:進入斷電之前的工作模式
5.13、硬件組態(tài)設(shè)置實時時鐘
CPU帶有實時時鐘(Time-of-day clock),在PLC的電源斷電時,用超級電容給實時時鐘供電.PLC通電24h后,超級電容被充足了足夠的能量,可以保證實時時鐘運行10天.
在線模式下可以設(shè)置CPU的實時時鐘的時間.

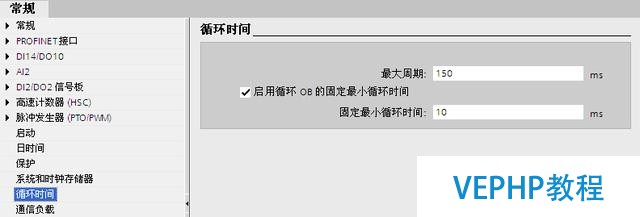
5.14、硬件組態(tài)設(shè)置循環(huán)時間和通信負(fù)載
循環(huán)時間是操作系統(tǒng)刷新過程映像和執(zhí)行程序循環(huán)OB的時間,包含所有中斷此循環(huán)的程序的執(zhí)行時間,每次循環(huán)的時間并不相等.
維易PHP學(xué)堂逐步分享更多《工業(yè)機器人周邊控制系統(tǒng)—西門子PLC編程軟件博途詳細(xì)入門?》相關(guān)教程。歡迎交流
轉(zhuǎn)載請注明本頁網(wǎng)址:
http://www.fzlkiss.com/jiaocheng/9122.html
同類教程排行
- 工業(yè)機器人周邊控制系統(tǒng)—西門子PLC編程
- Scratch兒童編程第3課-孫悟空72
- 工業(yè)機器人編程教程-機器人夾爪(工裝夾具
- MFC編程之Windows消息
- MFC編程:FTP多線程網(wǎng)絡(luò)編程實驗
- 華為c語言編程規(guī)范,學(xué)習(xí)編程從注釋開始,
- UG編程-中國首批編程人員定制圖檔
- MFC讓你的應(yīng)用發(fā)聲(TTS)
- CTF編程訓(xùn)練題------10000以
- 三菱PLC編程經(jīng)典案例講解
- 為什么VS2010做的MFC程序提示缺少
- 西門子SINUMERIK 802D 操作
- 工業(yè)機器人編程教程-機器人編程運動
- 無編程不邏輯——創(chuàng)未來機器人編程版
- 你以為數(shù)控編程很簡單?有了它就能實現(xiàn)
